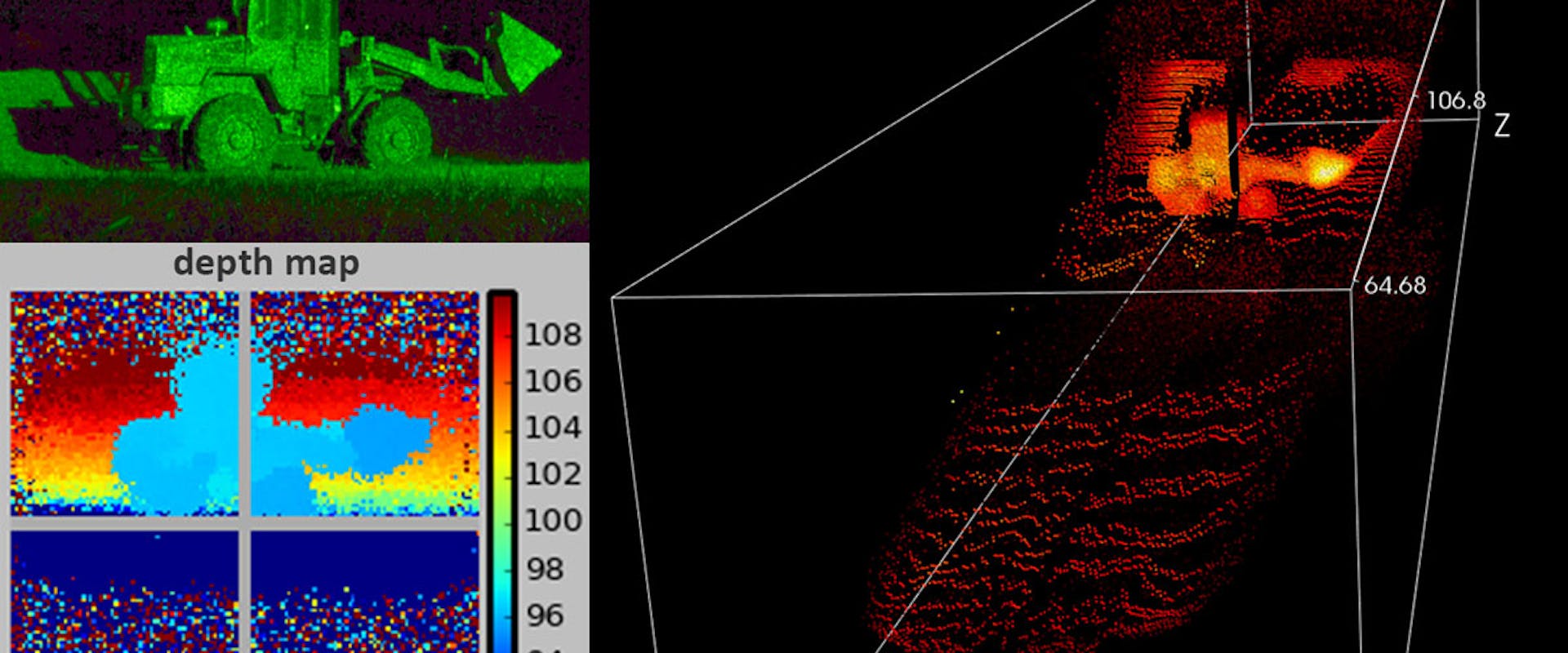
Light detection and ranging (Lidar) systems
Light Detection and Ranging (LiDAR) systems are developed at CSEM since 20 years. It started with the development of single point measurement of aerosols and clouds with thin laser beam.
Related News
30 January 2026
Swiss precision at the heart of next-generation weather forecasting
How Swiss precision engineering at CSEM helps Europe see extreme weather forming, by scanning the atmosphere with extraordinary accuracy, before it strikes....

5 June 2025
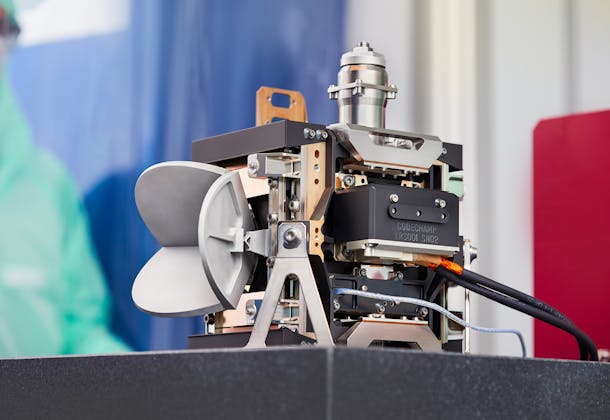
CSEM and Ifremer collaborate to advance deep-sea exploration with underwater lidar technology
In partnership with Ifremer, the French Research Institute for Exploitation of the Sea, CSEM is developing an underwater lidar system to map and explore the deep-sea environment....

21 January 2025
3D-printed pipe segment with integrated heater and sensor
AHEAD focuses on the development of 3D-printed pipe segments with integrated heating and sensing functions, designed for in situ measurements and energy harvesting in demanding environments such as sp...