The most outstanding representative of this LiDAR family is the Miniaturized Aerosol LiDAR (MAL) that is now a standard payload of the Geophysica stratospheric plane. Geophysica has flown on a regular basis in the frame of several European projects aiming at collecting data to better model the ozone hole or the Monsoon. In 2009, the receiver of a pseudo-random noise (PRN) LiDAR for clouds altitude survey was fitted with a 2D time-of-flight (TOF) matrix detector. This was the starting point of a new family of developments aiming at collecting three-dimensional (3D) images of various targets for autonomous navigation.
Nowadays, the term “LiDAR” is often associated with driverless car or autonomous drones. The technology is an essential complement to the cameras, radars and ultrasound beacons that are found on autonomous vehicles.
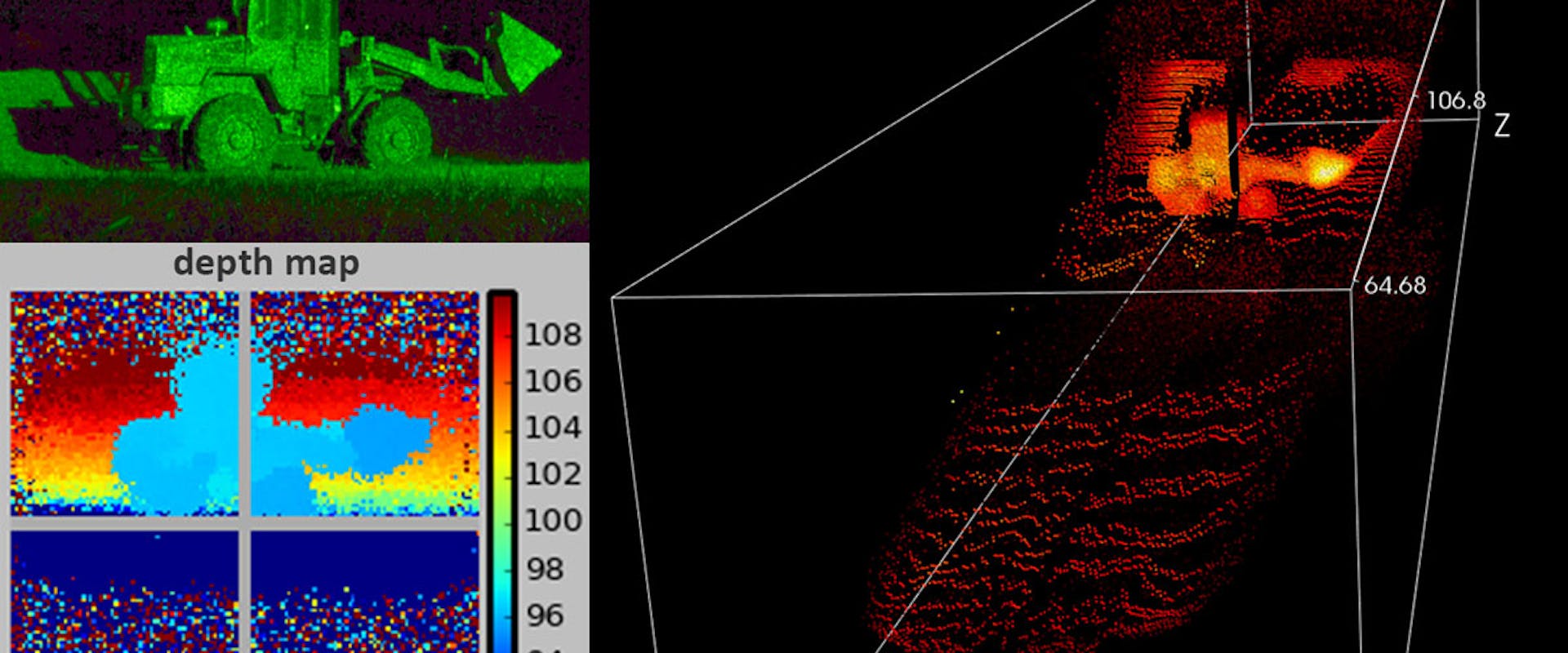
In relation with these applications, CSEM develops its own LiDARs based on a knowledge built mostly in the frame of projects with the European Space Agency (ESA). CSEM has developed several variants of the flash imaging LiDAR architecture. The “flash” denomination has been proposed to balance the “scan” specification. Indeed, most of the LiDARs are scanning LiDARs. These devices drives a thin laser beam over the scene of interest. On the contrary, a flash LiDAR takes a snapshot of the scene of interest with a more divergent laser beam. Hence, an intrinsic disadvantage of flash LiDAR is the lower optical power density on a given target. This shortcoming is compensated with the hybridization of the traditional flash LiDAR architecture. The hybridization stands in the ability of the solution proposed to adapt the illumination of the target to the light propagation conditions. For example, if the target is far away or if there is fog, a thin laser beam is used to get the essential information which is the distance. Then, once the signal quality is sufficient, the illumination is changed for a more divergent beam that allows capturing 3D image of the scene of interest
This approach has been implemented and demonstrated in the frame of the Miniaturized Laser Altimeter ESA project. The resulting demonstrator has the capability at the same time to measure distances over several kilometres with a range accuracy of a few centimetres and to capture 3D image with the same range accuracy and in addition with a spatial resolution of 10 centimetres at 300 m.